At present, LED street lights have been widely used in road lighting, urban lighting engineering and other fields. However, its control methods are mostly manual control or timing control. These two control methods are simple, but have obvious defects: the light intensity of LED street lamps cannot be automatically adjusted according to weather conditions or external natural light conditions, resulting in waste of electric energy.
To solve this problem, many scholars and engineers have done a lot of research work, trying to reduce the energy consumption of LED street lights. The engineer designed an intelligent monitoring system for LED street lights using GPRS and ZigBee, designed a three-level energy-saving control method (full power, half power, full off) for LED street lights using fuzzy control method, and designed LED street lights automatic control method using LED driver chip HV9910. Adapt to dimming circuits, etc. These methods can reduce LED energy consumption to a certain extent, but the control method is too simple, and the energy saving effect needs to be further improved.
The intensity of natural light at dusk slowly diminishes. According to this characteristic of natural light, the illumination of the adaptive LED street light gradually becomes stronger, keeping the overall illumination level (the sum of LED street light illumination and natural illumination) unchanged. This can not only make full use of natural light to compensate for LED street lights, but also reduce the energy consumption of LEDs.
In this adaptive control method, it is first necessary to complete the detection of light intensity and build a model of light intensity and LED driving voltage, so as to realize LED street light control. However, the experiment found that the input-output characteristics of the light intensity detection sensor, the light intensity and the LED driving voltage all had a nonlinear relationship.
2. LED Street Light Illumination Intensity Adaptive Control Method
2.1 Characteristics of natural light at dusk
The natural light intensity at dusk decreases slowly and non-linearly. At this time, if the illumination intensity of the LED street light is automatically adjusted to become stronger as the natural illumination becomes weaker, to ensure that the overall illumination intensity remains unchanged and achieve the purpose of maximizing energy saving, this is the adaptive control principle of the illumination intensity of the LED street light proposed in this paper.
2.2 LED light intensity adaptive adjustment model
The natural light at dusk is used to compensate the LED street light illumination, so that the overall illumination (the sum of the LED illumination and the natural illumination) is maintained at a constant level, so as to achieve the maximum energy saving of the LED, that is, the LED illumination is adaptively adjusted with the natural light intensity.
Assuming that the overall light intensity (ie, the output after compensation) is C0, the current natural light light intensity is y(t), and the light intensity that the LED street light needs to provide (ie, the target light intensity) is x(t), then:
x(t)=C0-y(t) (1)
Where: t is the time variable.
(t) is the illumination intensity of the LED street light, which is controlled by the driving voltage u, that is, (t) is a function of u. Ideally, (t)=x(t). Therefore, as long as the target illumination intensity x(t) at time t is obtained, the corresponding control voltage u can be obtained through the inverse model of illumination measurement. With the hardware drive circuit, the light intensity (t) can be obtained. Therefore, the light measurement inverse model is the key to light intensity control.
2.3 Neural network model of LED light intensity control
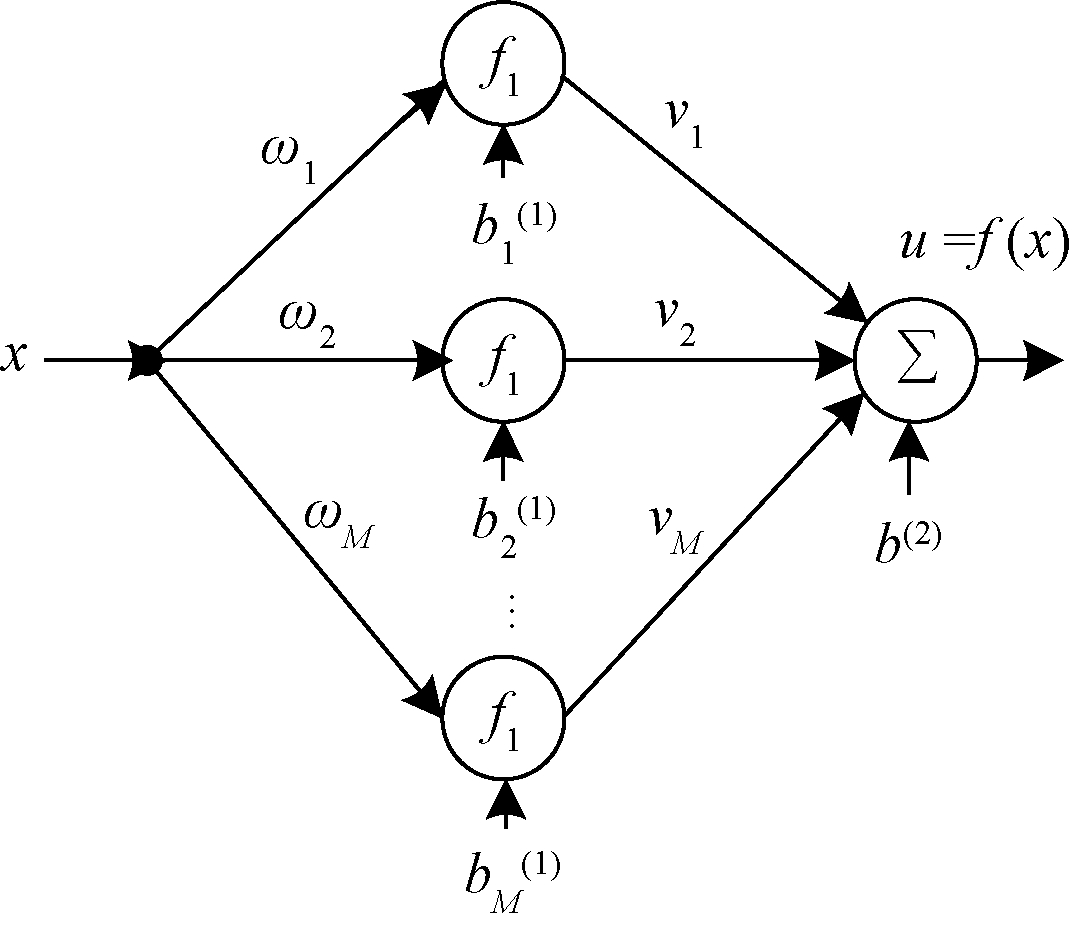
Experiments have found that X is a nonlinear function of u, so u is also a nonlinear function of X or x (u=f(x)), and its model is not easy to determine. Using the powerful function of approximating nonlinear functions of neural network, the approximation of the function u=f(x) can be realized, so as to complete the construction of the inverse model of illumination measurement. Since u=f(x) is a nonlinear function with single input and single output, the neural network used for inverse model construction is a 3-layer network with single input and single output, and its network model is shown in the figure below.
Figure: Inverse model of measuring LED’s illumination intensity based on neural network
In the figure, x is the input of the light measurement inverse model, f1 is the hidden layer transfer function, the logsig function is used, and ω=(ω1, ω2,…, ωM)T is the input layer-hidden layer weights
(2)
is the bias value of the hidden layer, v=(v1, v2,…, vM)T is the hidden layer-output layer weight, b(2) is the output layer bias value, and u is the output of the light measurement inverse model ,which is:
(3)
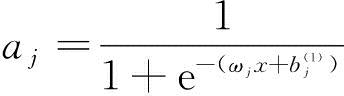
In the formula: the number M of neurons in the hidden layer can be determined by experiments, and aj is the output of the jth neuron in the hidden layer, namely:
(4)
2.4 CCNN algorithm
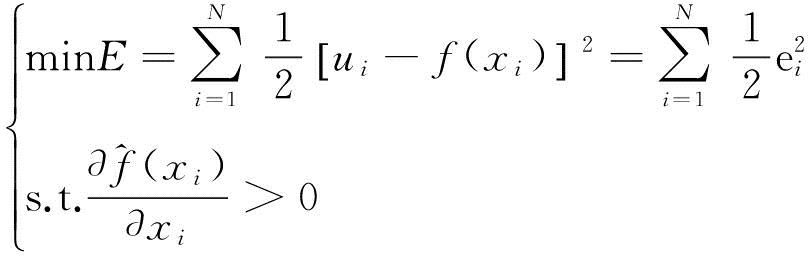
The experiment found that the output voltage u of LED street light measurement increases with the increase of the light intensity x(t), that is, u is a monotonically increasing function of x(t). Therefore, the function u=f(x) also satisfies the monotonically increasing property, that is, its derivative>0. This property can serve as a constraint for neural network training. Assuming that the objective function of neural network training is E, and the batch training method (N training samples) is used, then:
(5)
Where:
(6)
due to 0aj<>
(7)
Therefore, formula (4) can be modified as:
(8)
3. Adaptive Control of LED Street Light Intensity
3.1 LED street light illumination intensity adaptive control circuit
The natural light signal collected by the photosensitive sensor (photoresistor) is processed by the conditioning circuit and sent to the microprocessor STM32F103, and the natural light intensity information is obtained through its internal A/D conversion. Call the adaptive control model stored in the microprocessor (the neural network parameters ω, b(1), v, b(2) and control parameters La, Lb, etc. are stored in the microprocessor) to obtain the control quantity z(x ) (as shown in formula (9)).
(9)
At the same time, the PWM function of the microprocessor is used to obtain the adjustment amount of the illumination intensity of the LED street light (ie, the PWM control amount), and the LED street light driver chip is controlled to complete the brightness adjustment of the LED street light. In addition, the temperature sensor completes the heat monitoring of LED street lamps. Convert z(x) to the duty cycle of PWM, that is, equation (9) should be modified as:
(10)
In the formula: when zPWM(x)=0, the duty cycle of PWM is 0. At this time, the LED drive current is 0, and the LED does not work (does not light up). When zPWM(x)=FFFFH, the duty cycle of PWM is 1. At this time, the LED drive current is the largest, and the LED works at full power (maximum brightness).
3.2 Neural network model training
At dusk (such as from 17:00 to 19:00, the natural light changes from maximum to minimum), a total of 120 natural light intensity data yk are collected by the illuminometer, and the system collects the voltage signal uk under the corresponding light intensity. The target illumination intensity xk is obtained by formula (1). After the data (xk, uk) is normalized, the neural network sample (C0 of formula (1) is set as the natural illumination intensity at 17:00.
Among them, 100 groups are used as training samples, and the remaining 20 groups are used as test samples. Use the training algorithm shown in equations (7) to (9) to train the control model offline, where the target mean square error Err_MSE of the neural network is 0.000 000 000 01, the learning rate η is 0.5, and the number of neurons in the hidden layer M is 9 , the upper bound of the number of neural network training times is 10 000, the initial value of the multiplier λ(0) is 1.0, and the initial values of the neural network parameters ω(0), b(1)(0), v(0), b(2 )(0) is obtained by a random function with a penalty factor σ=2.0.
In order to compare the CNN method with the traditional data-driven neural network training method (DINN, that is, when training, only data samples are used and no constraints are used), the parameters of the two are the same.
4 Conclusion
The existing LED street lamps cannot automatically adjust the light intensity of the LED street lamps according to the external natural light conditions, resulting in waste of electric energy. In this paper, an automatic adjustment method of LED street light illumination intensity based on neural network is established. By constructing an inverse model of illumination intensity measurement, and using the prior knowledge of the LED street light illumination measurement system (the first derivative is greater than 0) to construct constraints, the inverse model is completed. The optimization of the LED street light realizes the adaptive adjustment of the illumination intensity of the LED street light with the natural illumination intensity.
Simulation experiments and field tests show that the performance of the CCNN method constructed with this prior knowledge is far superior to the DINN method (only data samples are used during training, and no prior knowledge is used). The maximum energy saving of LED street lights using this CCNN method exceeds 20% at dusk (17:10-18:00).